Траектория.
Самое важное для нас - это уметь вычислять перемещение тела, потому что, зная перемещение, можно найти и координаты тела, а это и есть главная задача механики. Как же вычислить перемещение при равноускоренном движении?
Формулу для определения перемещения проще всего получить, если воспользоваться графическим методом.
В § 9 мы видели, что при прямолинейном равномерном движении перемещение тела численно равно площади фигуры (прямоугольника), расположенной под графиком скорости. Верно ли это для равноускоренного движения?
При равноускоренном движении тела, происходящем вдоль координатной оси X, скорость с течением времени не остается постоянной, а меняется со временем согласно формулам:
![]()
Поэтому графики скорости имеют вид, показанный на рисунке 40. Прямая 1 на этом рисунке соответствует движению с «положительным» ускорением (скорость растет), прямая 2 - движению с «отрицательным» ускорением (скорость убывает). Оба графика относятся к случаю, когда в момент времени тело имело скорость
Выделим на графике скорости равноускоренного движения маленький участок (рис. 41) и опустим из точек а и перпендикуляры на ось Длина отрезка на оси численно равна тому малому промежутку времени, за который скорость изменилась от ее значения в точке а до ее значения в точке Под участком графика получилась узкая полоска


Нели промежуток времени, численно равный отрезку достаточно мал, то в течение этого времени изменение скорости тоже мало. Движение в течение этого промежутка времени можно считать равномерным, и полоска будет тогда мало отличаться от прямоугольника. Площадь полоски поэтому численно равна перемещению тела за время, соответствующее отрезку
Но на такие узкие полоски можно разбить всю площадь фигуры, расположенной под графиком скорости. Следовательно, перемещение за все время численно равно площади трапеции Площадь же трапеции, как известно из геометрии, равна произведению полусуммы ее оснований на высоту. В нашем случае длина одного из оснований трапеции численно равна длина другого - V. Высота же ее численно равна Отсюда следует, что перемещение равно:
![]()
Подставим в эту формулу вместо выражение (1а), тогда
Разделив почленно числитель на знаменатель, получим:
![]()
Подставив в формулу (2) выражение (16), получим (см. рис. 42):
![]()


Формулу (2а) применяют в том случае, когда вектор ускорения направлен так же, как и ось координат, а формулу (26) тогда, когда направление вектора ускорения противоположно направлению этой оси.
Если начальная скорость равна нулю (рис. 43) и вектор ускорения направлен по оси координат, то из формулы (2а) следует, что
Если же направление вектора ускорения противоположно направлению оси координат, то из формулы (26) следует, что
(знак «-» здесь означает, что вектор перемещения, так же как и вектор ускорения, направлен противоположно выбранной оси координат).
Напомним, что в формулах (2а) и (26) величины и могут быть как положительными, так и отрицательными - это проекции векторов и
Теперь, когда мы получили формулы для вычисления перемещения, нам легко получить и формулу для вычисления координаты тела. Мы видели (см. § 8), что, для того чтобы найти координату тела в какой-то момент времени надо к начальной координате прибавить проекцию вектора перемещения тела на ось координат:
![]()
(За) если вектор ускорения направлен так же, как и ось координат, и
![]()
если направление вектора ускорения противоположно направлению оси координат.
Это и есть формулы, позволяющие находить положение тела в любой момент времени при прямолинейном равноускоренном движении. Для этого нужно знать начальную координату тела его начальную скорость и ускорение а.
Задача 1. Водитель автомобиля, движущегося со скоростью 72 км/ч, увидел красный сигнал светофора и нажал на тормоз. После этого автомобиль начал тормозить, двигаясь с ускорением

Какое расстояние пройдет автомобиль за время сек после начала торможения? Какое расстояние пройдет автомобиль до полной остановки?
Решение. За начало координат выберем ту точку дороги, в которой автомобиль начал тормозить. Координатную ось направим по направлению движения автомобиля (рис. 44), а начало отсчета времени отнесем к моменту, в который водитель нажал на тормоз. Скорость автомобиля направлена так же, как ось X, а ускорение автомобиля противоположно направлению этой оси. Поэтому проекция скорости на ось X положительна, а проекция ускорения отрицательна и координату автомобиля нужно находить по формуле (36):
![]()
Подставляя в эту формулу значения
Теперь найдем, какое расстояние пройдет автомобиль до полной остановки. Для этого нам нужно знать время движения . Его можно узнать, воспользовавшись формулой
Так как в тот момент, когда автомобиль останавливается, его скорость равна нулю, то
![]()

Расстояние, которое пройдет автомобиль до полной остановки, равно координате автомобиля в момент времени
Задача 2. Определите перемещение тела, график скорости которого показан на рисунке 45. Ускорение тела равно а.
Решение. Так как сначала модуль скорости тела уменьшается со временем, то вектор ускорения направлен противоположно направлению . Для вычисления перемещения мы можем воспользоваться формулой
![]()
Из графика видно, что и время движения поэтому:
Полученный ответ показывает, что график, изображенный на рисунке 45, соответствует движению тела сначала в одном направлении, а затем на такое же расстояние в противоположном направлении, в результате чего тело оказывается в исходной точке. Подобный график может, например, относиться к движению тела, брошенного вертикально вверх.
Задача 3. Тело движется вдоль прямой равноускоренно с ускорением а. Найдите разность расстояний, проходимых телом за два следующих один за другим одинаковых промежутка времени т.
Решение. Примем прямую, вдоль которой движется тело, за ось X. Если в точке А (рис. 46) скорость тела была равна то его перемещение за время равно:
![]()
В точке В тело имело скорость и его перемещение за следующий промежуток времени равно:



2. На рисунке 47 изображены графики скорости движения трех тел? Каков характер движения этих тел? Что можно сказать о скоростях движения тел в моменты времени, соответствующие точкам А и В? Определите ускорения и напишите уравнения движений (формулы для скорости и перемещения) этих тел.
3. Пользуясь приведенными на рисунке 48 графиками скоростей трех тел, выполните следующие задания: а) Определите ускорения этих тел; б) составьте для
каждого тела формулу зависимости скорости от времени: в) в чем сходны и чем различаются движения, соответствующие графикам 2 и 3?
4. На рисунке 49 показаны графики скорости движения трех тел. По этим графикам: а) определите, чему соответствуют отрезки ОА, ОВ и ОС на осях координат; 6) найдите ускорения, с которыми движутся тела: в) напишите уравнения движения для каждого тела.
5. Самолет при взлете проходит взлетную полосу за 15 сек и в момент отрыва от зедлли имеет скорость 100 м/сек. С каким ускорением двигался самолет и какова длина взлетной полосы?
6. Автомобиль остановился у светофора. После того как загорелся зеленый сигнал, он начинает двигаться с ускорением и движется гак до тех пор, пока скорость его не станет равной 16 м/сек, после чего он продолжает движение с постоянной скоростью. На каком расстоянии от светофора окажется автомобиль через 15 сек после появления зеленого сигнала?
7. Снаряд, скорость которого равна 1 000 м/сек, пробивает стену блиндажа за и после этого имеет скорость 200 м/сек. Считая движение снаряда в толще стены равноускоренным, найдите толщину стены.
8. Ракета движется с ускорением и к некоторому моменту времени достигает скорости в 900 м/сек. Какой путь она пройдет в следующие
9. На каком расстоянии от Земли оказался бы космический корабль через 30 мин после старта, если бы он все время двигался прямолинейно с ускорением
Траектория (от позднелатинского trajectories – относящийся к перемещению) – это линия, по которой движется тело (материальная точка). Траектория движения может быть прямой (тело перемещается в одном направлении) и криволинейной, то есть механическое движение может быть прямолинейным и криволинейным.
Траектория прямолинейного движения в данной системе координат – это прямая линия. Например, можно считать, что траектория движения автомобиля по ровной дороге без поворотов является прямолинейной.
Криволинейное движение – это движение тел по окружности, эллипсу, параболе или гиперболе. Пример криволинейного движения – движение точки на колесе движущегося автомобиля или движение автомобиля в повороте.
Движение может быть сложным. Например, траектория движения тела в начале пути может быть прямолинейной, затем криволинейной. Например, автомобиль в начале пути движется по прямой дороге, а затем дорога начинает «петлять» и автомобиль начинает криволинейное движение.
Путь
Путь – это длина траектории. Путь является скалярной величиной и в международной системе единиц СИ измеряется в метрах (м). Расчёт пути выполняется во многих задачах по физике. Некоторые примеры будут рассмотрены далее в этом учебнике.
Вектор перемещения
Вектор перемещения (или просто перемещение ) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.1). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который соединяет начальную и конечную точки движения) может быть равен пройденному пути или быть меньше пройденного пути. Но никогда модуль вектора перемещения не может быть больше пройденного пути.
Модуль вектора перемещения равен пройденному пути, когда путь совпадает с траекторией (см. разделы и ), например, если из точки А в точку Б автомобиль перемещается по прямой дороге. Модуль вектора перемещения меньше пройденного пути, когда материальная точка движется по криволинейной траектории (рис. 1.1).
Рис. 1.1. Вектор перемещения и пройденный путь.
На рис. 1.1:
Ещё пример. Если автомобиль проедет по кругу один раз, то получится, что точка начала движения совпадёт с точкой конца движения и тогда вектор перемещения будет равен нулю, а пройденный путь будет равен длине окружности. Таким образом, путь и перемещение – это два разных понятия .
Правило сложения векторов
Векторы перемещений складываются геометрически по правилу сложения векторов (правило треугольника или правило параллелограмма, см. рис. 1.2).

Рис. 1.2. Сложение векторов перемещений.
На рис 1.2 показаны правила сложения векторов S1 и S2:
а) Сложение по правилу треугольника
б) Сложение по правилу параллелограмма
Проекции вектора перемещения
При решении задач по физике часто используют проекции вектора перемещения на координатные оси. Проекции вектора перемещения на координатные оси могут быть выражены через разности координат его конца и начала. Например, если материальная точка переместилась из точки А в точку В, то при этом вектор перемещения (см.рис. 1.3).
Выберем ось ОХ так, чтобы вектор лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно А x и В x . Длина отрезка А x В x на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
S x = A x B x
ВАЖНО!
Напоминаю для тех, кто не очень хорошо знает математику: не путайте вектор с проекцией вектора на какую-либо ось (например, S x). Вектор всегда обозначается буквой или несколькими буквами, над которыми находится стрелка. В некоторых электронных документах стрелку не ставят, так как это может вызвать затруднения при создании электронного документа. В таких случаях ориентируйтесь на содержание статьи, где рядом с буквой может быть написано слово «вектор» или каким-либо другим способом вам указывают на то, что это именно вектор, а не просто отрезок.

Рис. 1.3. Проекция вектора перемещения.
Проекция вектора перемещения на ось ОХ равна разности координат конца и начала вектора, то есть
S x = x – x 0
Аналогично определяются и записываются проекции вектора перемещения на оси OY и OZ:
S y = y – y 0 S z = z – z 0
Здесь x 0 , y 0 , z 0 — начальные координаты, или координаты начального положения тела (материальной точки); x, y, z — конечные координаты, или координаты последующего положения тела (материальной точки).
Проекция вектора перемещения считается положительной, если направление вектора и направление координатной оси совпадают (как на рис 1.3). Если направление вектора и направление координатной оси не совпадают (противоположны), то проекция вектора отрицательна (рис. 1.4).
Если вектор перемещения параллелен оси, то модуль его проекции равен модулю самого Вектора. Если вектор перемещения перпендикулярен оси, то модуль его проекции равен нулю (рис. 1.4).

Рис. 1.4. Модули проекции вектора перемещения.
Разность между последующим и начальным значениями какой-нибудь величины называется изменением этой величины. То есть проекция вектора перемещения на координатную ось равна изменению соответствующей координаты. Например, для случая, когда тело перемещается перпендикулярно оси Х (рис. 1.4) получается, что относительно оси Х тело НЕ ПЕРЕМЕЩАЕТСЯ. То есть перемещение тела по оси Х равно нулю.
Рассмотрим пример движения тела на плоскости. Начальное положение тела – точка А с координатами х 0 и у 0 , то есть А(х 0 , у 0). Конечное положение тела – точка В с координатами х и у, то есть В(х, у). Найдём модуль перемещения тела.
Из точек А и В опустим перпендикуляры на оси координат ОХ и OY (рис. 1.5).

Рис. 1.5. Движение тела на плоскости.
Определим проекции вектора перемещения на осях ОХ и OY:
S x = x – x 0 S y = y – y 0
На рис. 1.5 видно, что треугольник АВС – прямоугольный. Из этого следует, что при решении задачи может использоваться теорема Пифагора , с помощью которой можно найти модуль вектора перемещения, так как
АС = s x CB = s y
По теореме Пифагора
S 2 = S x 2 + S y 2
Откуда можно найти модуль вектора перемещения, то есть длину пути тела из точки А в точку В:
Ну и напоследок предлагаю вам закрепить полученные знания и рассчитать несколько примеров на ваше усмотрение. Для этого введите какие-либо цифры в поля координат и нажмите кнопку РАССЧИТАТЬ. Ваш браузер должен поддерживать выполнение сценариев (скриптов) JavaScript и выполнение сценариев должно быть разрешено в настройках вашего браузера, иначе расчет не будет выполнен. В вещественных числах целая и дробная части должны разделяться точкой, например, 10.5.
Основные единицы измерения величин в системе СИ таковы:
- единица измерения длины - метр (1 м),
- времени - секунда (1 с),
- массы - килограмм (1 кг),
- количества вещества - моль (1 моль),
- температуры - кельвин (1 К),
- силы электрического тока - ампер (1 А),
- Справочно: силы света - кандела (1 кд, фактически не используется при решении школьных задач).
При выполнении расчетов в системе СИ углы измеряются в радианах.
Если в задаче по физике не указано, в каких единицах нужно дать ответ, его нужно дать в единицах системы СИ или в производных от них величинах, соответствующих той физической величине, о которой спрашивается в задаче. Например, если в задаче требуется найти скорость, и не сказано в чем ее нужно выразить, то ответ нужно дать в м/с.
Для удобства в задачах по физике часто приходится использовать дольные (уменьшающие) и кратные (увеличивающие) приставки. их можно применять к любой физической величине. Например, мм – миллиметр, кт – килотонна, нс – наносекунда, Мг – мегаграмм, ммоль – миллимоль, мкА – микроампер. Запомните, что в физике не существует двойных приставок. Например, мкг – это микрограмм, а не милликилограмм. Учтите, что при сложении и вычитании величин Вы можете оперировать только величинами одинаковой размерности. Например, килограммы можно складывать только с килограммами, из миллиметров можно вычитать только миллиметры, и так далее. При переводе величин пользуйтесь следующей таблицей.
Путь и перемещение
Кинематикой называют раздел механики, в котором движение тел рассматривается без выяснения причин этого движения.
Механическим движением тела называют изменение его положения в пространстве относительно других тел с течением времени.
Всякое тело имеет определенные размеры. Однако, во многих задачах механики нет необходимости указывать положения отдельных частей тела. Если размеры тела малы по сравнению с расстояниями до других тел, то данное тело можно считать материальной точкой . Так при движении автомобиля на большие расстояния можно пренебречь его длиной, так как длина автомобиля мала по сравнению с расстояниями, которое он проходит.
Интуитивно понятно, что характеристики движения (скорость, траектория и т.д.) зависят от того, откуда мы на него смотрим. Поэтому для описания движения вводится понятие системы отсчета. Система отсчета (СО) – совокупность тела отсчета (оно считается абсолютно твердым), привязанной к нему системой координат, линейки (прибора, измеряющего расстояния), часов и синхронизатора времени.
Перемещаясь с течением времени из одной точки в другую, тело (материальная точка) описывает в данной СО некоторую линию, которую называют траекторией движения тела .
Перемещением тела называют направленный отрезок прямой, соединяющий начальное положение тела с его конечным положением. Перемещение есть векторная величина. Перемещением может в процессе движение увеличиваться, уменьшаться и становиться равным нулю.
Пройденный путь равен длине траектории, пройденной телом за некоторое время. Путь – скалярная величина. Путь не может уменьшаться. Путь только возрастает либо остается постоянным (если тело не движется). При движении тела по криволинейной траектории модуль (длина) вектора перемещения всегда меньше пройденного пути.
При равномерном (с постоянной скоростью) движении путь L может быть найден по формуле:
где: v – скорость тела, t – время в течении которого оно двигалось. При решении задач по кинематике перемещение обычно находится из геометрических соображений. Часто геометрические соображения для нахождения перемещения требуют знания теоремы Пифагора.
Средняя скорость
Скорость – векторная величина, характеризующая быстроту перемещения тела в пространстве. Скорость бывает средней и мгновенной. Мгновенная скорость описывает движение в данный конкретный момент времени в данной конкретной точке пространства, а средняя скорость характеризует все движение в целом, в общем, не описывая подробности движения на каждом конкретном участке.
Средняя скорость пути – это отношение всего пути ко всему времени движения:

где: L полн – весь путь, который прошло тело, t полн – все время движения.
Средняя скорость перемещения – это отношение всего перемещения ко всему времени движения:

Эта величина направлена так же, как и полное перемещение тела (то есть из начальной точки движения в конечную точку). При этом не забывайте, что полное перемещение не всегда равно алгебраической сумме перемещений на определённых этапах движения. Вектор полного перемещения равен векторной сумме перемещений на отдельных этапах движения.
- При решении задач по кинематике не совершайте очень распространенную ошибку. Средняя скорость, как правило, не равна среднему арифметическому скоростей тела на каждом этапе движения. Среднее арифметическое получается только в некоторых частных случаях.
- И уж тем более средняя скорость не равна одной из скоростей, с которыми двигалось тело в процессе движения, даже если эта скорость имела примерно промежуточное значение относительно других скоростей, с которыми двигалось тело.
Равноускоренное прямолинейное движение
Ускорение – векторная физическая величина, определяющая быстроту изменения скорости тела. Ускорением тела называют отношение изменения скорости к промежутку времени, в течение которого происходило изменение скорости:
![]()
где: v 0 – начальная скорость тела, v – конечная скорость тела (то есть спустя промежуток времени t ).
Далее, если иное не указано в условии задачи, мы считаем, что если тело движется с ускорением, то это ускорение остается постоянным. Такое движение тела называется равноускоренным (или равнопеременным). При равноускоренном движении скорость тела изменяется на одинаковую величину за любые равные промежутки времени.
Равноускоренное движение бывает собственно ускоренным, когда тело увеличивает скорость движения, и замедленным, когда скорость уменьшается. Для простоты решения задач удобно для замедленного движения брать ускорение со знаком «–».
Из предыдущей формулы, следует другая более распространённая формула, описывающая изменение скорости со временем при равноускоренном движении:
Перемещение (но не путь) при равноускоренном движении рассчитывается по формулам:

![]()
В последней формуле использована одна особенность равноускоренного движения. При равноускоренном движении среднюю скорость можно рассчитывать, как среднее арифметическое начальной и конечной скоростей (этим свойством очень удобно пользоваться при решении некоторых задач):
С расчетом пути все сложнее. Если тело не меняло направления движения, то при равноускоренном прямолинейном движении путь численно равен перемещению. А если меняло – надо отдельно считать путь до остановки (момента разворота) и путь после остановки (момента разворота). А просто подстановка времени в формулы для перемещения в этом случае приведет к типичной ошибке.
Координата при равноускоренном движении изменяется по закону:

Проекция скорости при равноускоренном движении изменяется по такому закону:
![]()
Аналогичные формулы получаются для остальных координатных осей.
Свободное падение по вертикали
На все тела, находящиеся в поле тяготения Земли, действует сила тяжести. В отсутствие опоры или подвеса эта сила заставляет тела падать к поверхности Земли. Если пренебречь сопротивлением воздуха, то движение тел только под действием силы тяжести называется свободным падением. Сила тяжести сообщает любым телам, независимо от их формы, массы и размеров, одинаковое ускорение, называемое ускорением свободного падения. Вблизи поверхности Земли ускорение свободного падения составляет:
Это значит, что свободное падение всех тел вблизи поверхности Земли является равноускоренным (но не обязательно прямолинейным) движением. Вначале рассмотрим простейший случай свободного падения, когда тело движется строго по вертикали. Такое движение является равноускоренным прямолинейным движением, поэтому все изученные ранее закономерности и фокусы такого движения подходят и для свободного падения. Только ускорение всегда равно ускорению свободного падения.
Традиционно при свободном падении используют направленную вертикально ось OY. Ничего страшного здесь нет. Просто надо во всех формулах вместо индекса «х » писать «у ». Смысл этого индекса и правило определения знаков сохраняется. Куда направлять ось OY – Ваш выбор, зависящий от удобства решения задачи. Вариантов 2: вверх или вниз.
Приведем несколько формул, которые являются решением некоторых конкретных задач по кинематике на свободное падение по вертикали. Например, скорость, с которой упадет тело падающее с высоты h без начальной скорости:
Время падения тела с высоты h без начальной скорости:

Максимальная высота на которую поднимется тело, брошенное вертикально вверх с начальной скоростью v 0 , время подъема этого тела на максимальную высоту, и полное время полета (до возвращения в исходную точку):
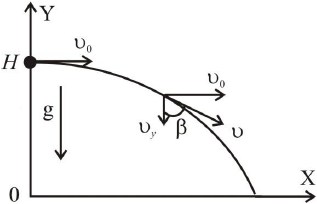
Горизонтальный бросок
При горизонтальном броске с начальной скоростью v 0 движение тела удобно рассматривать как два движения: равномерное вдоль оси ОХ (вдоль оси ОХ нет никаких сил препятствующих или помогающих движению) и равноускоренного движения вдоль оси OY.
Скорость в любой момент времени направлена по касательной к траектории. Ее можно разложить на две составляющие: горизонтальную и вертикальную. Горизонтальная составляющая всегда остается неизменной и равна v x = v 0 . А вертикальная возрастает по законам ускоренного движения v y = gt . При этом полная скорость тела может быть найдена по формулам:
![]()
![]()
При этом важно понять, что время падения тела на землю никоим образом не зависит от того, с какой горизонтальной скоростью его бросили, а определяется только высотой, с которой было брошено тело. Время падения тела на землю находится по формуле:
Пока тело падает, оно одновременно движется вдоль горизонтальной оси. Следовательно, дальность полета тела или расстояние, которое тело сможет пролететь вдоль оси ОХ, будет равно:

Угол между горизонтом и скоростью тела легко найти из соотношения:

Также иногда в задачах могут спросить о моменте времени, при котором полная скорость тела будет наклонена под определенным углом к вертикали . Тогда этот угол будет находиться из соотношения:

Важно понять, какой именно угол фигурирует в задаче (с вертикалью или с горизонталью). Это и поможет вам выбрать правильную формулу. Если же решать эту задачу координатным методом, то общая формула для закона изменения координаты при равноускоренном движении:
![]()
Преобразуется в следующий закон движения по оси OY для тела брошенного горизонтально:
При ее помощи мы можем найти высоту на которой будет находится тело в любой момент времени. При этом в момент падения тела на землю координата тела по оси OY будет равна нулю. Очевидно, что вдоль оси OХ тело движется равномерно, поэтому в рамках координатного метода горизонтальная координата изменятся по закону:
Бросок под углом к горизонту (с земли на землю)
Максимальная высота подъема при броске под углом к горизонту (относительно начального уровня):
Время подъема до максимальной высоты при броске под углом к горизонту:
Дальность полета и полное время полета тела брошенного под углом к горизонту (при условии, что полет заканчивается на той же высоте с которой начался, т.е. тело бросали, например, с земли на землю):

Минимальная скорость тела брошенного под углом к горизонту – в наивысшей точке подъёма, и равна:
Максимальная скорость тела брошенного под углом к горизонту – в моменты броска и падения на землю, и равна начальной. Это утверждение верно только для броска с земли на землю. Если тело продолжает лететь ниже того уровня, с которого его бросали, то оно будет там приобретать все большую и большую скорость.
Сложение скоростей
Движение тел можно описывать в различных системах отсчета. С точки зрения кинематики все системы отсчета равноправны. Однако кинематические характеристики движения, такие как траектория, перемещение, скорость, в разных системах оказываются различными. Величины, зависящие от выбора системы отсчета, в которой производится их измерение, называют относительными. Таким образом, покой и движение тела относительны.
Таким образом, абсолютная скорость тела равна векторной сумме его скорости относительно подвижной системы координат и скорости самой подвижной системы отсчета. Или, другими словами, скорость тела в неподвижной системе отсчета равна векторной сумме скорости тела в подвижной системе отсчета и скорости подвижной системы отсчета относительно неподвижной.
Равномерное движение по окружности
Движение тела по окружности является частным случаем криволинейного движения. Такой вид движения также рассматривается в кинематике. При криволинейном движении вектор скорости тела всегда направлен по касательной к траектории. То же самое происходит и при движении по окружности (см. рисунок). Равномерное движение тела по окружности характеризуется рядом величин.

Период – время, за которое тело, двигаясь по окружности, совершает один полный оборот. Единица измерения – 1 с. Период рассчитывается по формуле:
Частота – количество оборотов, которое совершило тело, двигаясь по окружности, в единицу времени. Единица измерения – 1 об/с или 1 Гц. Частота рассчитывается по формуле:
В обеих формулах: N – количество оборотов за время t . Как видно из вышеприведенных формул, период и частота величины взаимообратные:
![]()
При равномерном вращении скорость тела будет определяется следующим образом:
![]()
где: l – длина окружности или путь, пройденный телом за время равное периоду T . При движении тела по окружности удобно рассматривать угловое перемещение φ (или угол поворота), измеряемое в радианах. Угловой скоростью ω тела в данной точке называют отношение малого углового перемещения Δφ к малому промежутку времени Δt . Очевидно, что за время равное периоду T тело пройдет угол равный 2π , следовательно при равномерном движении по окружности выполняются формулы:
![]()
Угловая скорость измеряется в рад/с. Не забывайте переводить углы из градусов в радианы. Длина дуги l связана с углом поворота соотношением:
Связь между модулем линейной скорости v и угловой скоростью ω :
![]()
При движении тела по окружности с постоянной по модулю скоростью изменяется только направление вектора скорости, поэтому движение тела по окружности с постоянной по модулю скоростью является движением с ускорением (но не равноускоренным), так как меняется направление скорости. В этом случае ускорение направлено по радиусу к центру окружности. Его называют нормальным, или центростремительным ускорением , так как вектор ускорения в любой точке окружности направлен к ее центру (см. рисунок).

Модуль центростремительного ускорения связан с линейной v и угловой ω скоростями соотношениями:
![]()
Обратите внимание, что если тела (точки) находятся на вращающемся диске, шаре, стержне и так далее, одним словом на одном и том же вращающемся объекте, то у всех тел одинаковые период вращения, угловая скорость и частота.
Равномерное движение – это движение с постоянной скоростью, то есть когда скорость не изменяется (v = const) и ускорения или замедления не происходит (а = 0).
Прямолинейное движение – это движение по прямой линии, то есть траектория прямолинейного движения – это прямая линия.
– это движение, при котором тело за любые равные промежутки времени совершает одинаковые перемещения. Например, если мы разобьём какой-то временной интервал на отрезки по одной секунде, то при равномерном движении тело будет перемещаться на одинаковое расстояние за каждый из этих отрезков времени.
Скорость равномерного прямолинейного движения не зависит от времени и в каждой точке траектории направлена также, как и перемещение тела. То есть вектор перемещения совпадает по направлению с вектором скорости. При этом средняя скорость за любой промежуток времени равна мгновенной скорости:
Скорость равномерного прямолинейного движения – это физическая векторная величина, равная отношению перемещения тела за любой промежуток времени к значению этого промежутка t:
V(вектор) = s(вектор) / t
Таким образом, скорость равномерного прямолинейного движения показывает, какое перемещение совершает материальная точка за единицу времени.
Перемещение при равномерном прямолинейном движении определяется формулой:
s(вектор) = V(вектор) t
Пройденный путь при прямолинейном движении равен модулю перемещения. Если положительное направление оси ОХ совпадает с направлением движения, то проекция скорости на ось ОХ равна величине скорости и положительна:
v x = v, то есть v > 0
Проекция перемещения на ось ОХ равна:
s = vt = x – x 0
где x 0 – начальная координата тела, х – конечная координата тела (или координата тела в любой момент времени)
Уравнение движения , то есть зависимость координаты тела от времени х = х(t), принимает вид:
Если положительное направление оси ОХ противоположно направлению движения тела, то проекция скорости тела на ось ОХ отрицательна, скорость меньше нуля (v < 0), и тогда уравнение движения принимает вид:
4. Равнопеременное движение.
Равномерное прямолинейное движение – это частный случай неравномерного движения.
Неравномерное движение – это движение, при котором тело (материальная точка) за равные промежутки времени совершает неодинаковые перемещения. Например, городской автобус движется неравномерно, так как его движение состоит в основном из разгонов и торможений.
Равнопеременное движение – это движение, при котором скорость тела (материальной точки) за любые равные промежутки времени изменяется одинаково.
Ускорение тела при равнопеременном движении остаётся постоянным по модулю и по направлению (a = const).
Равнопеременное движение может быть равноускоренным или равнозамедленным.
Равноускоренное движение – это движение тела (материальной точки) с положительным ускорением, то есть при таком движении тело разгоняется с неизменным ускорением. В случае равноускоренного движения модуль скорости тела с течением времени возрастает, направление ускорения совпадает с направлением скорости движения.
Равнозамедленное движение – это движение тела (материальной точки) с отрицательным ускорением, то есть при таком движении тело равномерно замедляется. При равнозамедленном движении векторы скорости и ускорения противоположны, а модуль скорости с течением времени уменьшается.
В механике любое прямолинейное движение является ускоренным, поэтому замедленное движение отличается от ускоренного лишь знаком проекции вектора ускорения на выбранную ось системы координат.
Средняя скорость переменного движения определяется путём деления перемещения тела на время, в течение которого это перемещение было совершено. Единица измерения средней скорости – м/с.
Мгновенная скорость – это скорость тела (материальной точки) в данный момент времени или в данной точке траектории, то есть предел, к которому стремится средняя скорость при бесконечном уменьшении промежутка времени Δt:
V=lim(^t-0) ^s/^t
Вектор мгновенной скорости равнопеременного движения можно найти как первую производную от вектора перемещения по времени:
V(вектор) = s’(вектор)
Проекция вектора скорости на ось ОХ:
это производная от координаты по времени (аналогично получают проекции вектора скорости на другие координатные оси).
Ускорение – это величина, которая определяет быстроту изменения скорости тела, то есть предел, к которому стремится изменение скорости при бесконечном уменьшении промежутка времени Δt:
а(вектор) = lim (t-0) ^v(вектор)/^t
Вектор ускорения равнопеременного движения можно найти как первую производную от вектора скорости по времени или как вторую производную от вектора перемещения по времени:
a(вектор) = v(вектор)" = s(вектор)"
Учитывая, что 0 – скорость тела в начальный момент времени (начальная скорость), – скорость тела в данный момент времени (конечная скорость), t – промежуток времени, в течение которого произошло изменение скорости,формула ускорения будет следующей:
a(вектор) = v(вектор)-v0(вектор)/t
Отсюда формула скорости равнопеременного движения в любой момент времени:
v(вектор) = v 0 (вектор) + a(вектор)t
Если тело движется прямолинейно вдоль оси ОХ прямолинейной декартовой системы координат, совпадающей по направлению с траекторией тела, то проекция вектора скорости на эту ось определяется формулой:
v x = v 0x ± a x t
Знак «-» (минус) перед проекцией вектора ускорения относится к равнозамедленному движению. Аналогично записываются уравнения проекций вектора скорости на другие оси координат.
Так как при равнопеременном движении ускорение является постоянным (a = const), то график ускорения – это прямая, параллельная оси 0t (оси времени, рис. 1.15).
 Рис.
1.15. Зависимость ускорения тела от
времени.
Рис.
1.15. Зависимость ускорения тела от
времени.
Зависимость скорости от времени – это линейная функция, графиком которой является прямая линия (рис. 1.16).
 Рис.
1.16. Зависимость скорости тела от времени.
Рис.
1.16. Зависимость скорости тела от времени.
График зависимости скорости от времени (рис. 1.16) показывает, что
![]()
При этом перемещение численно равно площади фигуры 0abc (рис. 1.16).
Площадь трапеции равна произведению полусуммы длин её оснований на высоту. Основания трапеции 0abc численно равны:
Высота трапеции равна t. Таким образом, площадь трапеции, а значит, и проекция перемещения на ось ОХ равна:

В случае равнозамедленного движения проекция ускорения отрицательна и в формуле для проекции перемещения перед ускорением ставится знак «–» (минус).
Общая формула для определения проекции перемещения:
![]()
График зависимости скорости тела от времени при различных ускорениях показан на рис. 1.17. График зависимости перемещения от времени при v0 = 0 показан на рис. 1.18.
 Рис.
1.17. Зависимость скорости тела от времени
для различных значений ускорения.
Рис.
1.17. Зависимость скорости тела от времени
для различных значений ускорения.
 Рис.
1.18. Зависимость перемещения тела от
времени.
Рис.
1.18. Зависимость перемещения тела от
времени.
Скорость тела в данный момент времени t 1 равна тангенсу угла наклона между касательной к графику и осью времени v = tg α, а перемещение определяют по формуле:
Если время движения тела неизвестно, можно использовать другую формулу перемещения, решая систему из двух уравнений:

Формула сокращённого умножения разности квадратов поможет нам вывести формулу для проекции перемещения:
![]()
Так как координата тела в любой момент времени определяется суммой начальной координаты и проекции перемещения, то уравнение движения тела будет выглядеть следующим образом:
![]()
Графиком координаты x(t) также является парабола (как и график перемещения), но вершина параболы в общем случае не совпадает с началом координат. При а x < 0 и х 0 = 0 ветви параболы направлены вниз (рис. 1.18).
Прямолинейное равномерное движение - это такое движение, при котором за одинаковые промежутки времени, тело проходит одинаковое расстояние.
Равномерное движение - это такое движение тела, при котором его скорость остается постоянной (),то есть все время движется с одной скоростью, а ускорение или замедление не происходит ().
Прямолинейное движение - это движение тела по прямой линии, то есть траектория у нас получается - прямая.
Скорость равномерного прямолинейного движения не зависит от времени и в каждой точке траектории направлена также, как и перемещение тела. То есть вектор скорости совпадает с вектором перемещения. При всем этом средняя скорость в любой промежуток времени равна начальной и мгновенной скорости:
Скорость равномерного прямолинейного движения - это физическая векторная величина, равная отношению перемещения тела за любой промежуток времен к значению этого промежутка t:
Из данной формулы. мы легко можем выразить перемещение тела при равномерном движении:
Рассмотрим зависимость скорости и перемещения от времени
Так как тело у нас движется прямолинейно и равноускоренно (), то график с зависимостью скорости от времени будет выгладить, как параллельная прямая оси времени.

В зависимости проекции скорости тела от времени ничего сложного нет. Проекция перемещения тела численно равна площади прямоугольника АОВС, так как величина вектора перемещения равна произведению вектора скорости на время, за которое было совершено перемещение.

На графике мы видим зависимость перемещения от времени .

Из графика видно, что проекция скорости равна:

Рассмотрев эту формулу. мы можем сказать, чем больше угол, тем быстрей движется наше тело и оно проходит больший путь за меньшее время



